Portfolio Category: Robotics
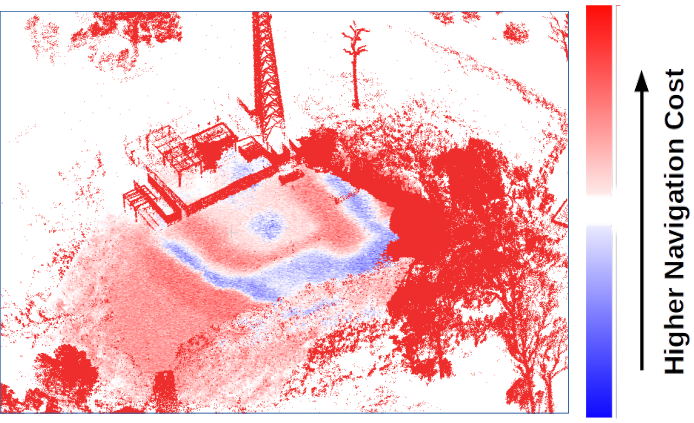
Three-dimensional Mapping with Augmented Navigation Cost
computer vision / robotics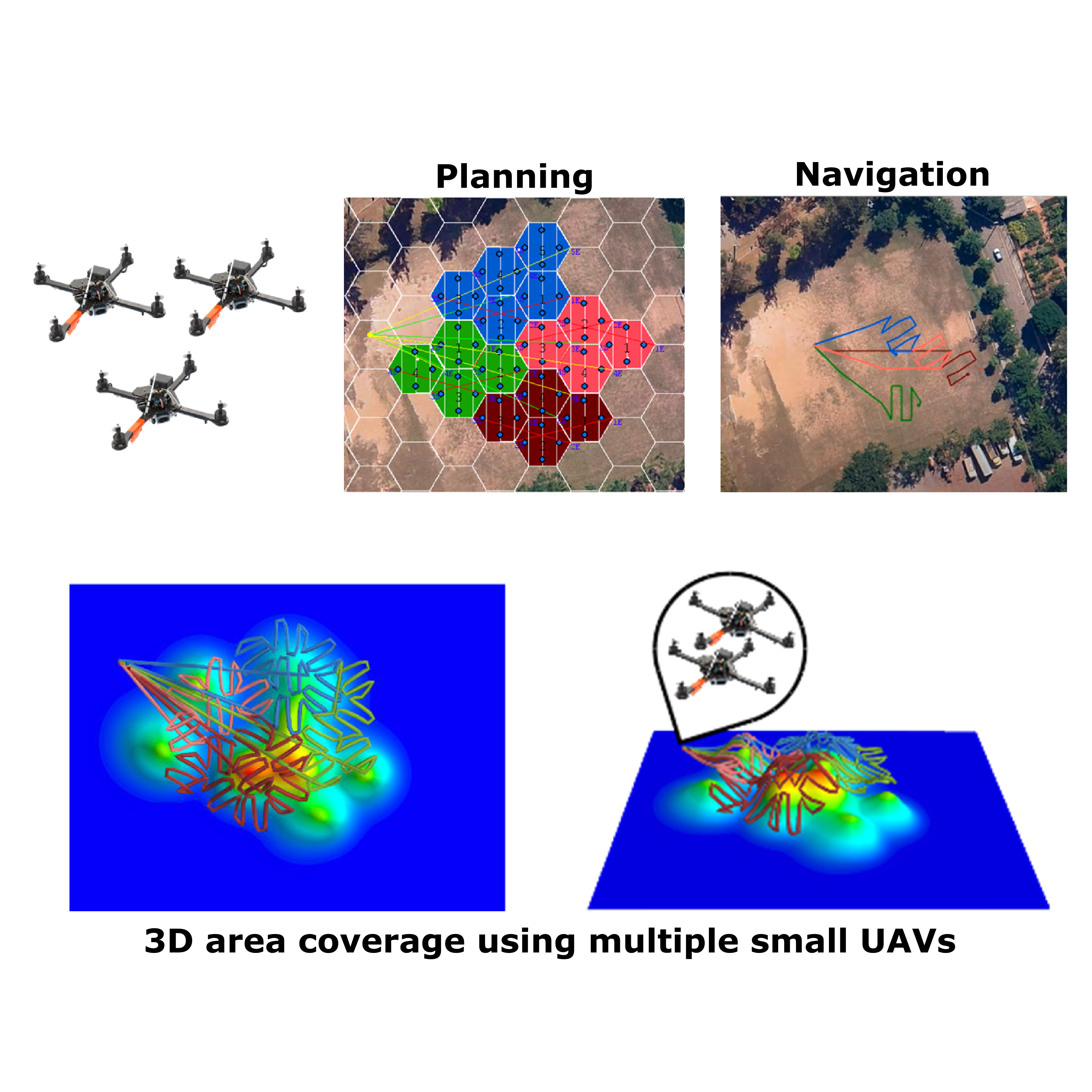
Cooperative Area Coverage Using Hexagonal Segmentation
robotics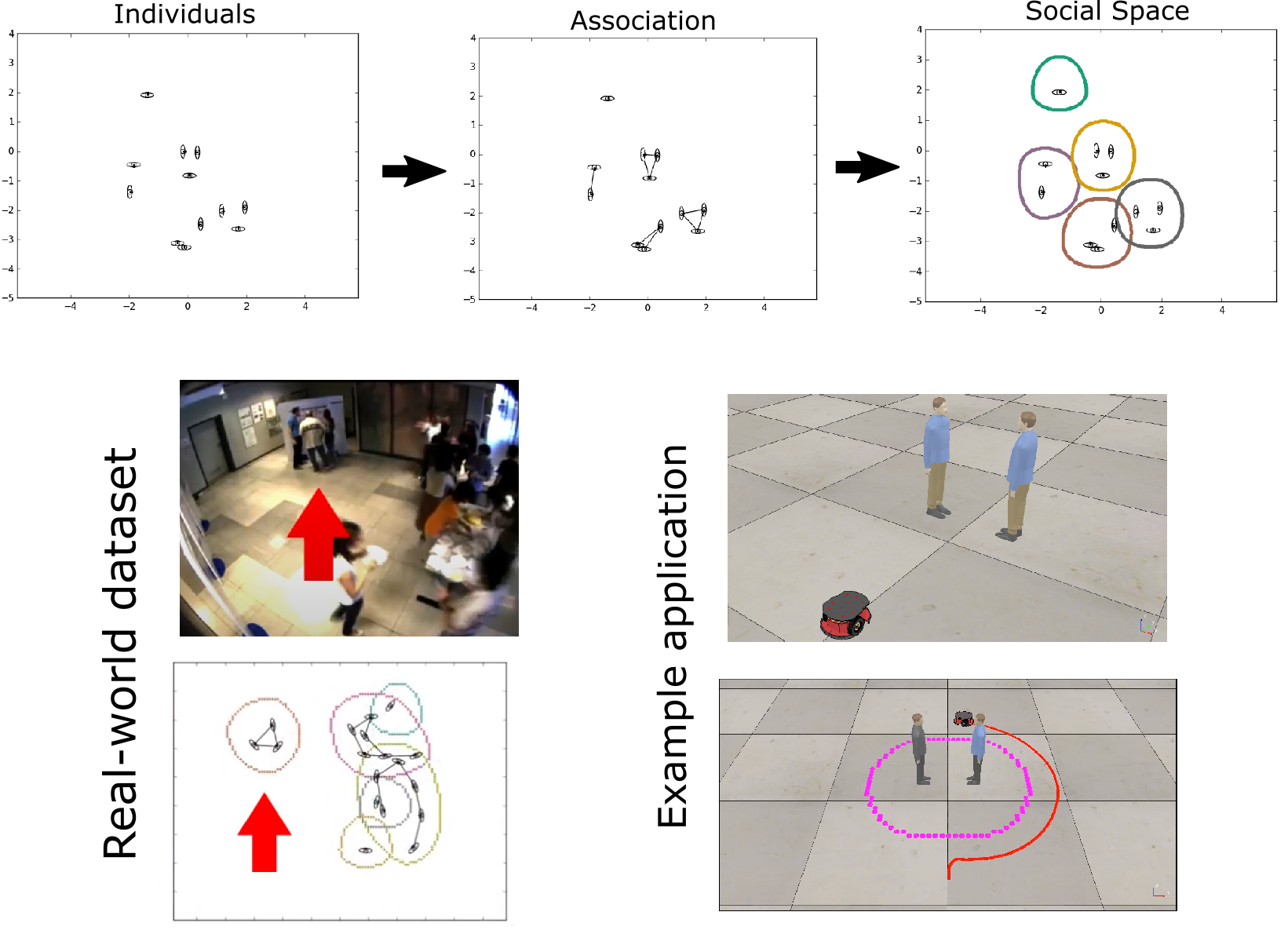
Determining the Association of Individuals and the Collective Social Space
robotics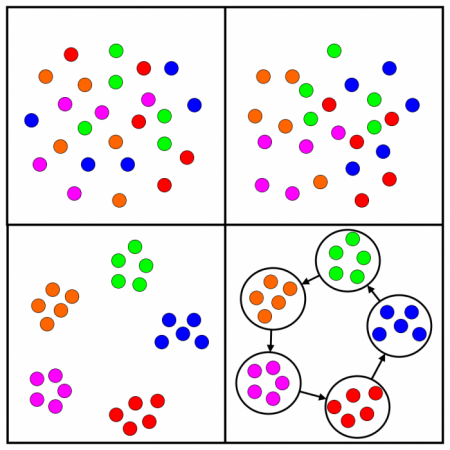
Robotic Swarm Segregation
robotics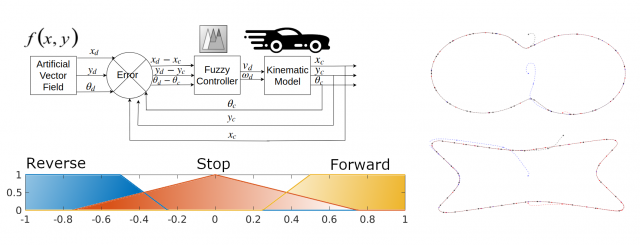
Control Strategies for Robot Navigation
robotics
Semantic Mapping for Visual Robot Navigation
computer vision / robotics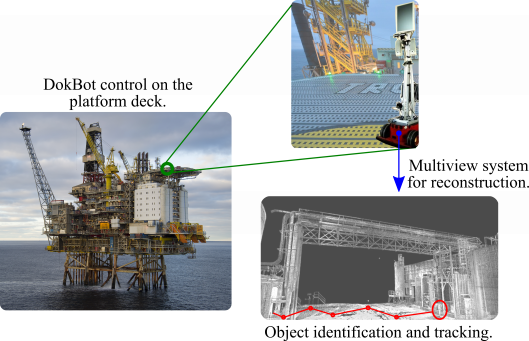
Multiview system for monitoring the C & M process.
computer vision / robotics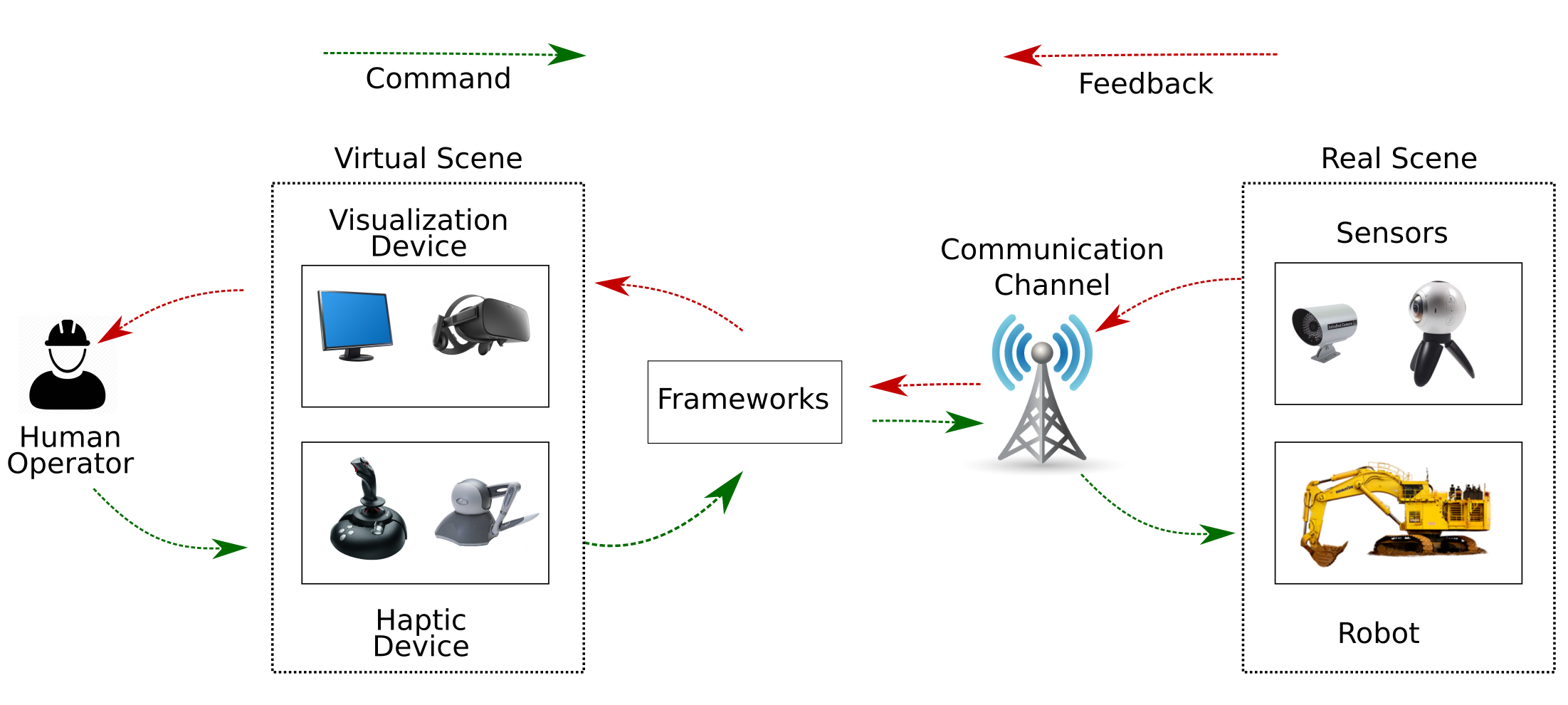
Advanced teleoperation of mining equipment: bulldozer
computer vision / robotics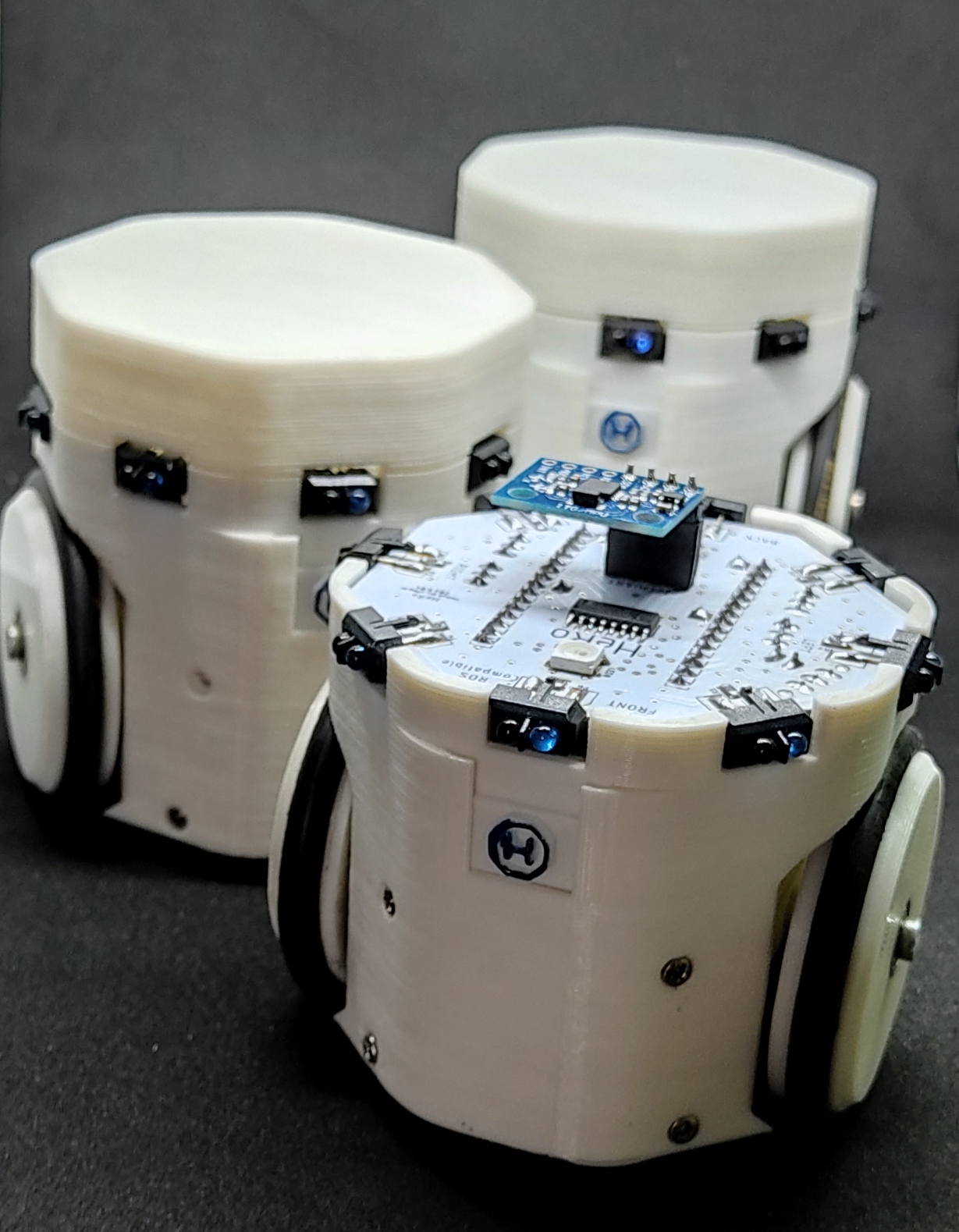
HeRo: An Open Platform for Robotics Research and Education
robotics
MultiUAV Coordination and Control
robotics