Portfolio Category: Computer Vision
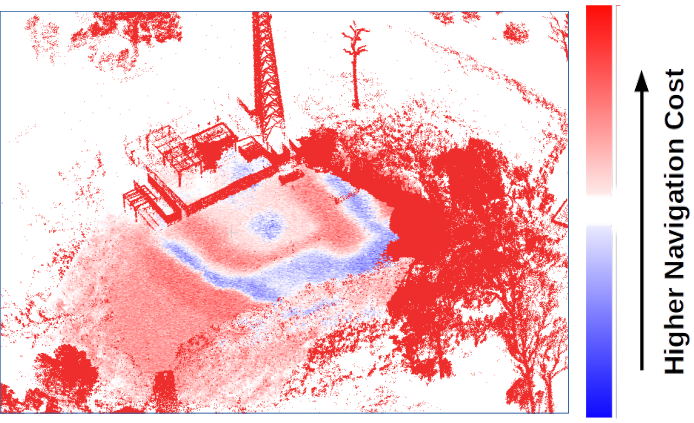
Three-dimensional Mapping with Augmented Navigation Cost
computer vision / robotics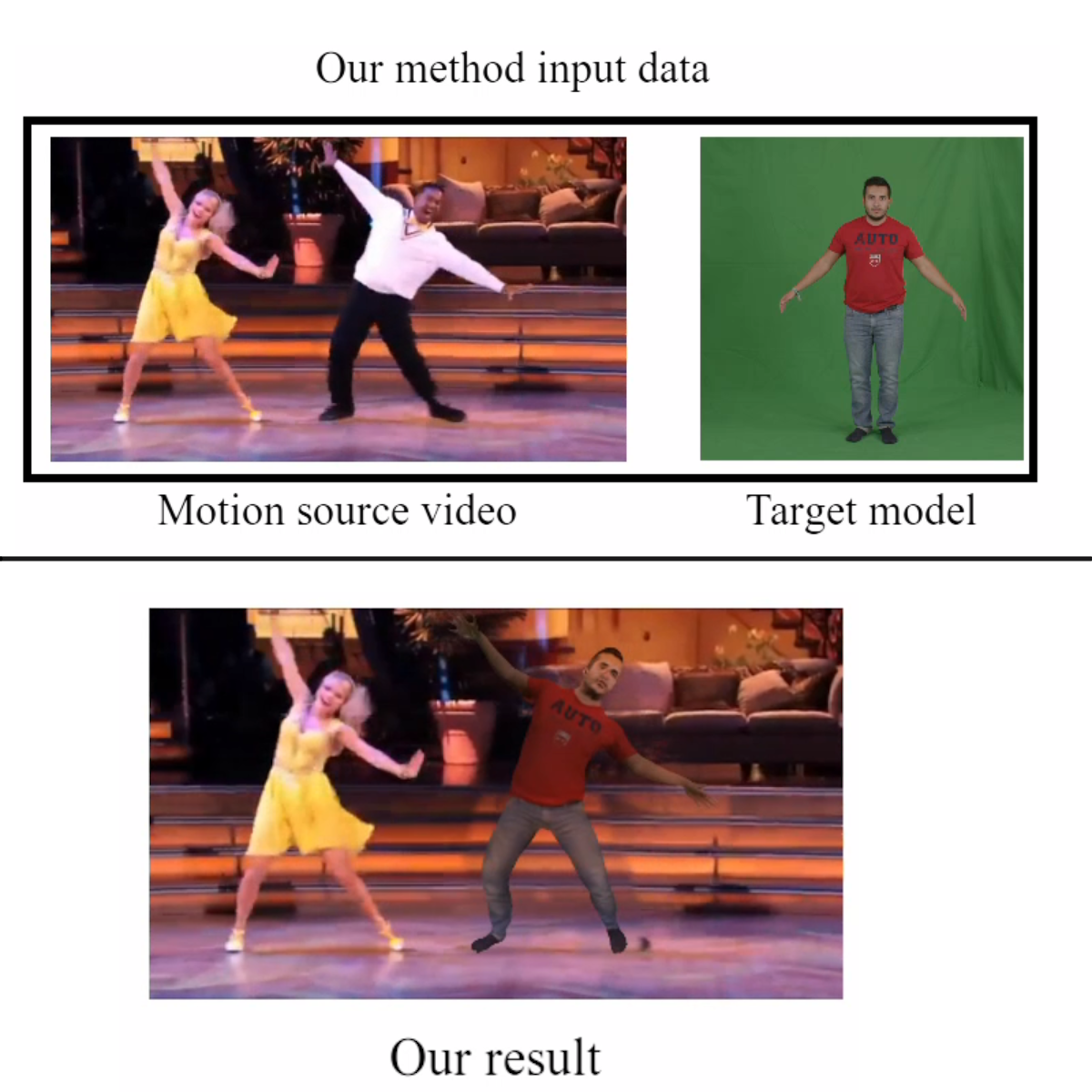
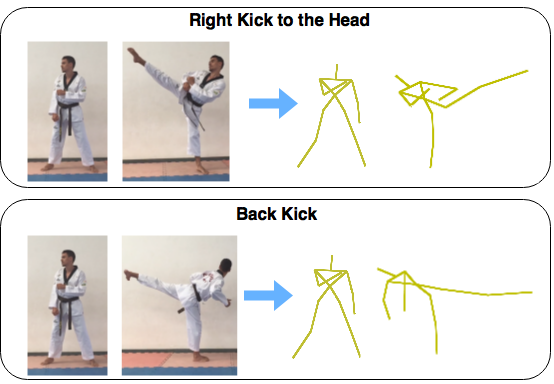
Human Motion Analysis
computer graphics / computer vision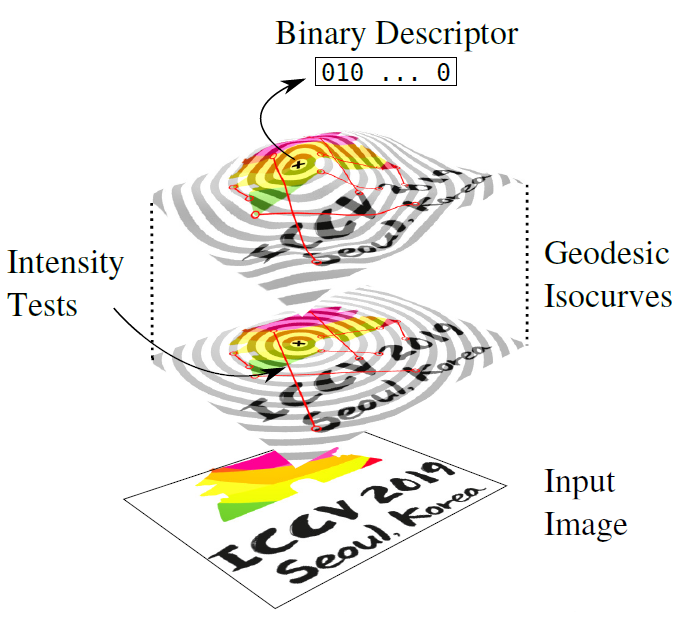
RGB-D Descriptor for non-rigid deformations
computer vision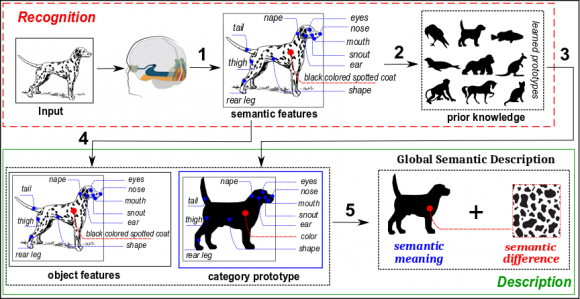
Semantic Description of Objects in Images Based on Prototype Theory
computer vision
Semantic Mapping for Visual Robot Navigation
computer vision / robotics
Detecting Landmarks on Faces in Different Domains
computer vision
Underwater Imaging
computer vision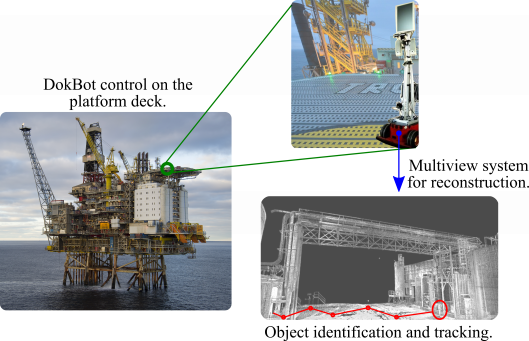
Multiview system for monitoring the C & M process.
computer vision / robotics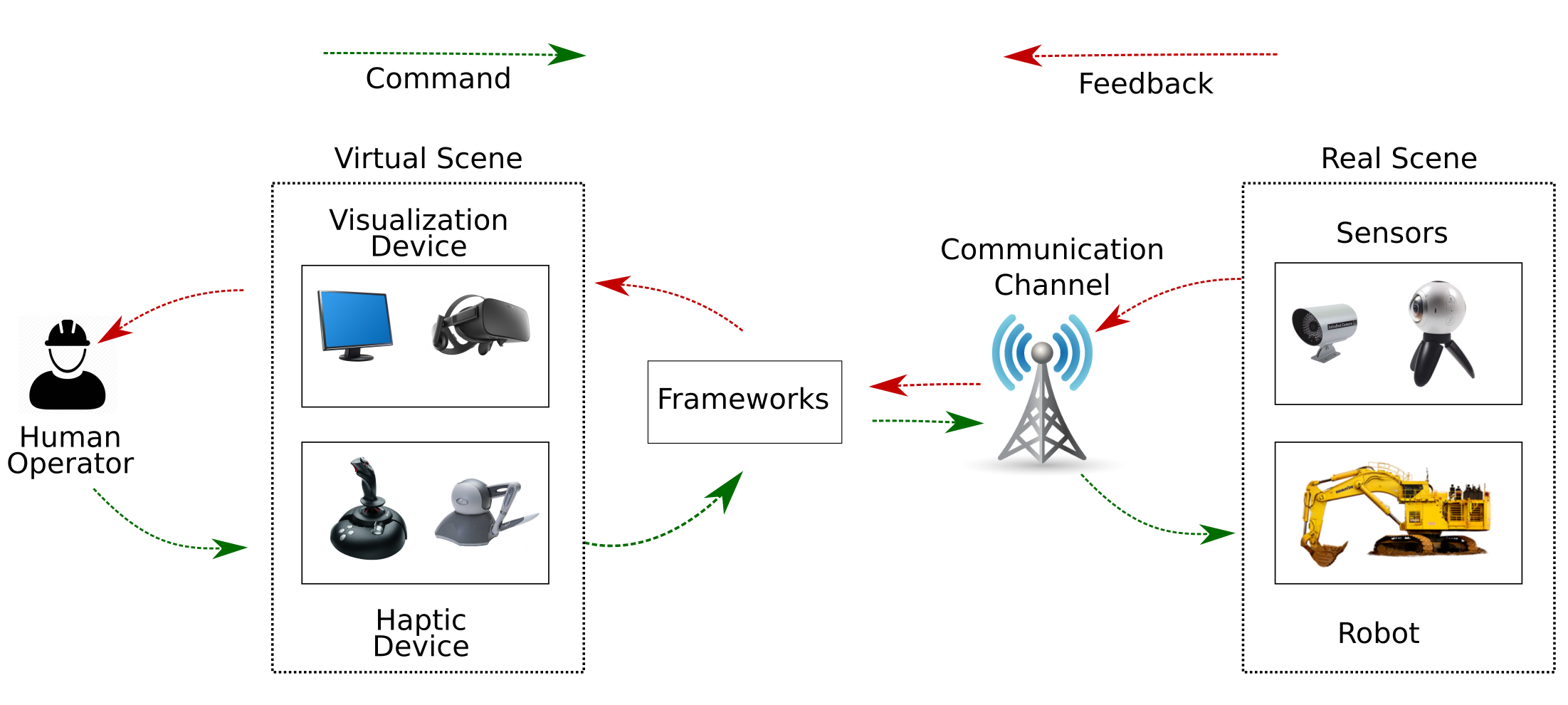
Advanced teleoperation of mining equipment: bulldozer
computer vision / robotics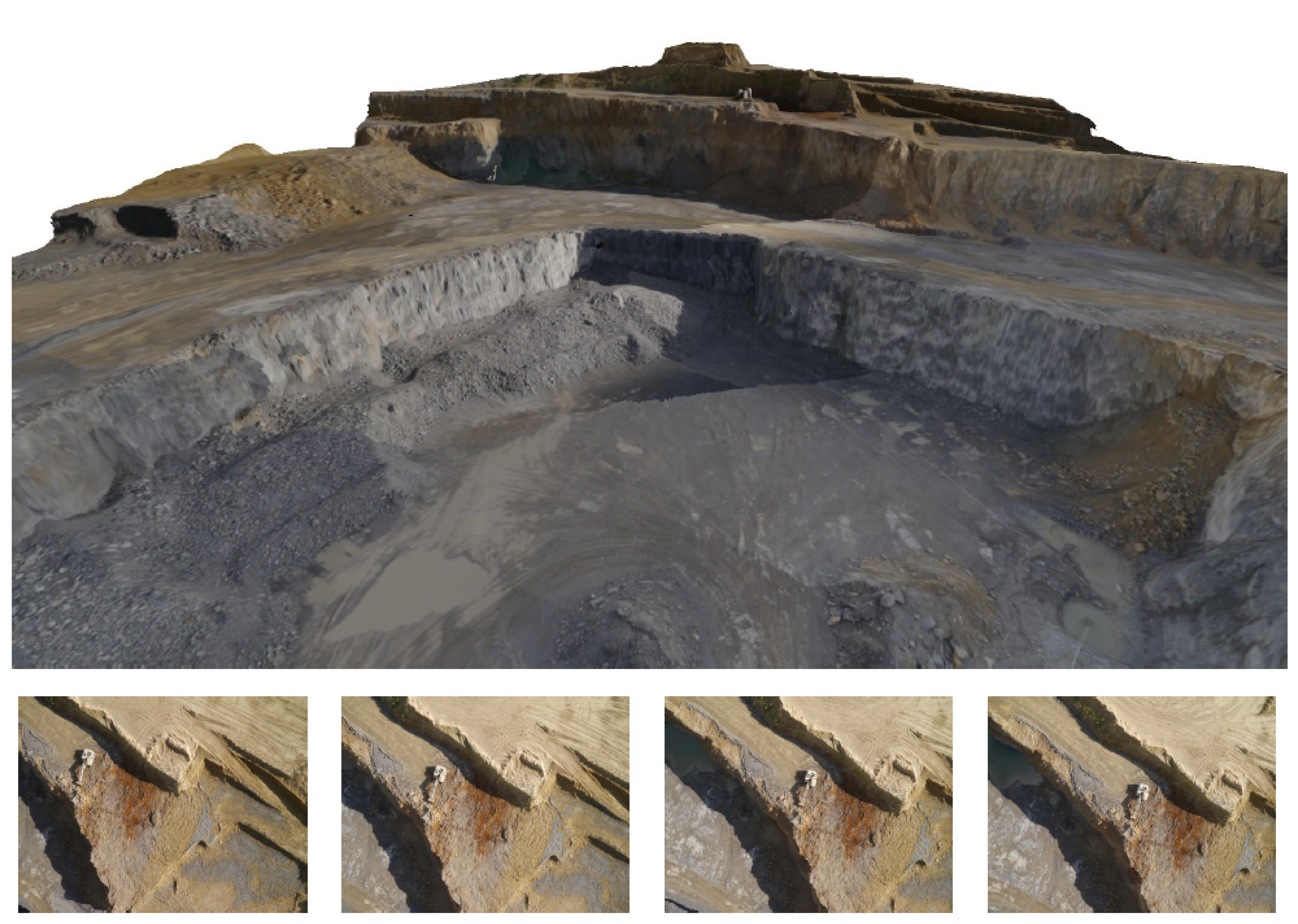
Three-Dimensional Reconstruction from Large Image Datasets
computer vision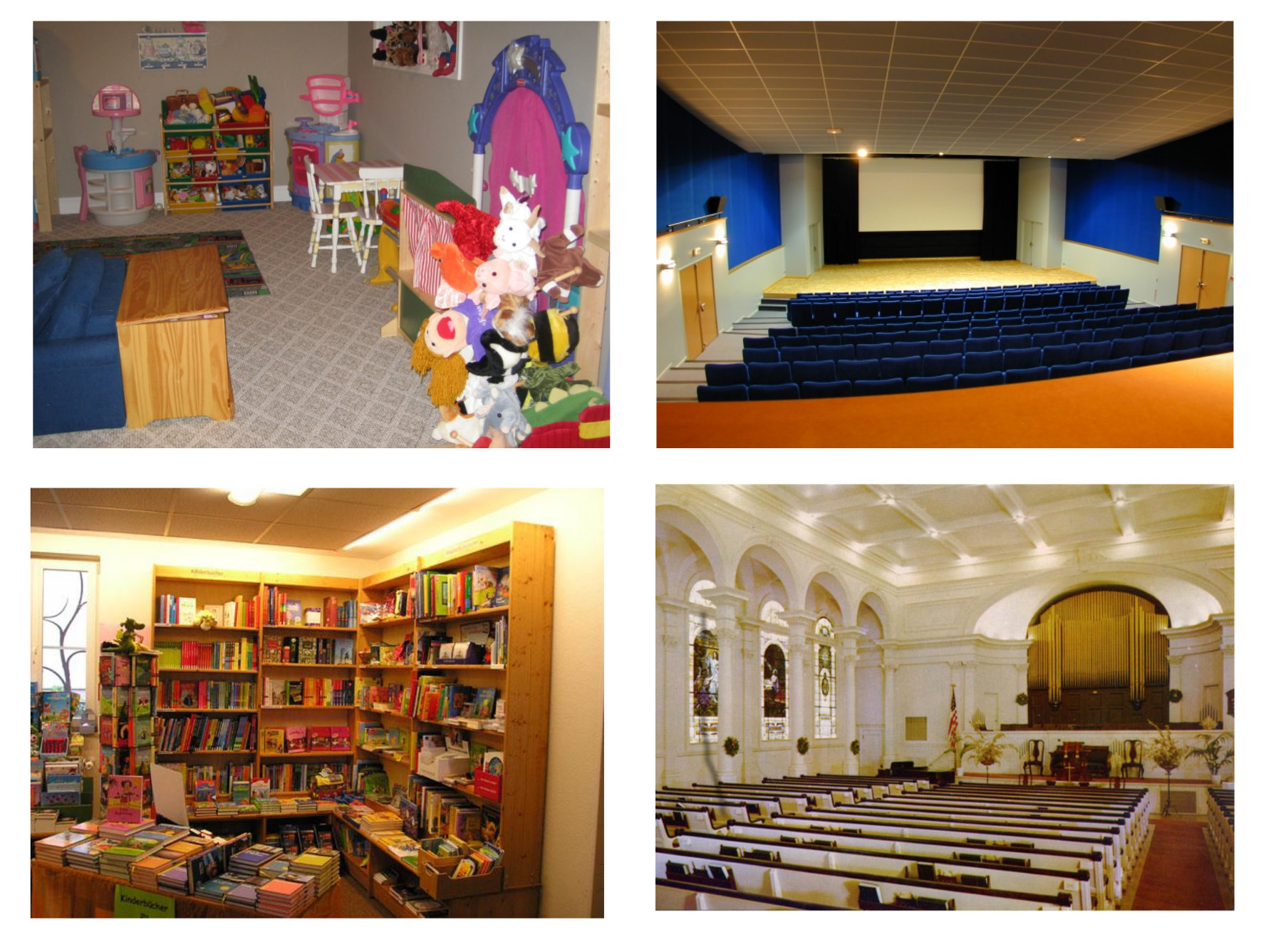
Scene Understanding
computer vision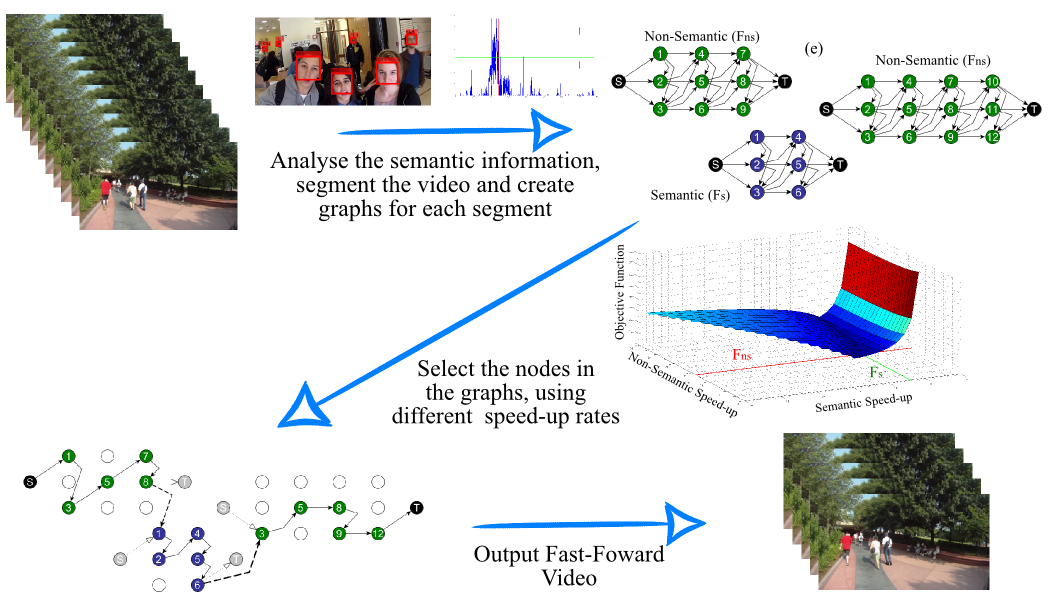
Semantic Hyperlapse Video
computer vision