
Cooperative Area Coverage Using Hexagonal Segmentation
Mobile Robotics have generated considerable interest in recent decades, mainly due to the advances that have lead to the development and use of mobile robots to perform tasks in several different areas. The mapping and area coverage problems are major challenges in Robotics that have many applications such as surveillance, detection of unexploded ordnance, and rescue, among others, in which the cooperation of different simultaneous robots can improve the performance of these tasks.
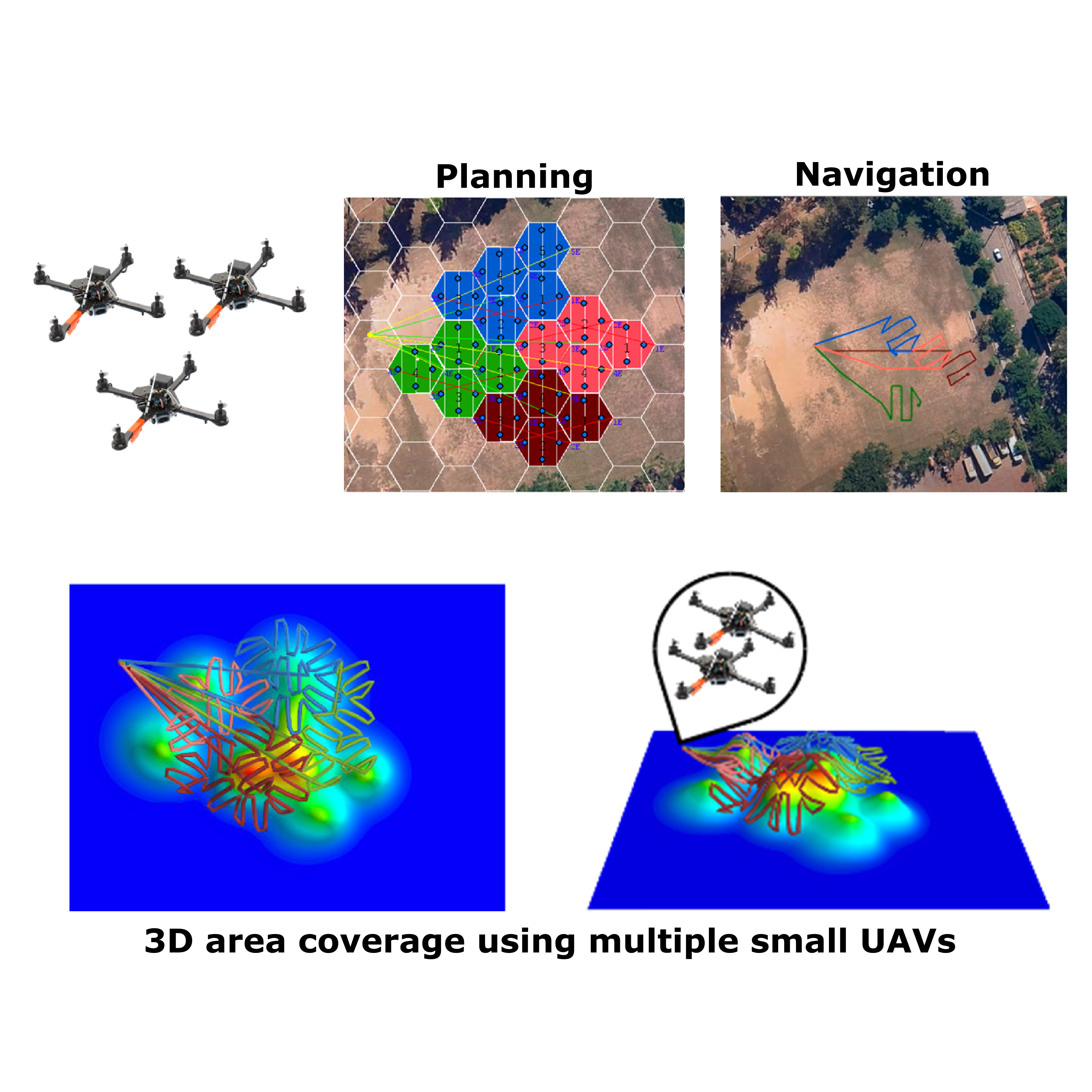
This work presents a complete and cooperative coverage methodology based on a hexagonal tessellation of the environment, on where robot teams will work together to cover a concave or convex, region of interest. The proposed method supports different configurations depending on the mapping being performed. We also implement a simple but efficient approach for resilient task allocation to allow the fulfillment of the coverage, even if there is only one robot left of the team. This methodology was adapted to function with 2D and 3D coverage and was used in a cooperative aerial mapping system to detect magnetic anomalies.
We approached the coverage problem as a cellular decomposition where the region of interest segments into regular hexagons. The resulting sub-regions are allocated and organized efficiently between different teams of robots. The internal coverage routes inside those sub-regions are optimized considering the angle of coverage, the number of teams of robots, the number of robots inside a team, flight height, and battery capacity of the robots. We evaluated different techniques of path allocation between the robot teams, and conclude that the clustering approach was the one that generated the most homogeneous allocations between the teams.
The method was evaluated in simulated and real experiments. The simulation assessed the behavior of the system, varying each of the parameters within the system. Experiments with real robots verified the feasibility of implementing this methodology in a group of small UAVs.
Videos
Publications
[ROBOTICA2018] Héctor Azpúrua, Gustavo M. Freitas, Douglas G. Macharet, and Mario F. M. Campos. Multi-robot coverage path planning using hexagonal segmentation for geophysical surveys, Robotica, 36(8), pp. 1144-116, 2018. DOI:10.1017/S0263574718000292
[CASE2016] Héctor I. A. Perez-imaz, Paulo A. F. Rezeck, Douglas G. Macharet, and Mario F. M. Campos. Multi-robot 3D coverage path planning for First Responders teams, IEEE International Conference on Automation Science and Engineering (CASE), pp. 1374-1379, 2016. DOI: 10.1109/COASE.2016.7743569
Acknowledgments
This project was partially supported by ITV/Vale, CNPq, CAPES, and FAPEMIG.
Team

Héctor Ignacio Azpúrua Perez-Imaz
Assistant Professor
Mario F. M. Campos
Professor