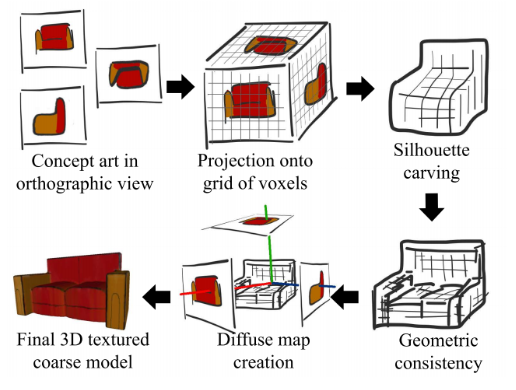
A 3D modeling methodology based on a concavity-aware geometric test to create 3D textured coarse models from concept art and orthographic projectionscomputer graphics