
Things we have done
All ProjectsControl Strategies for Robot Navigation
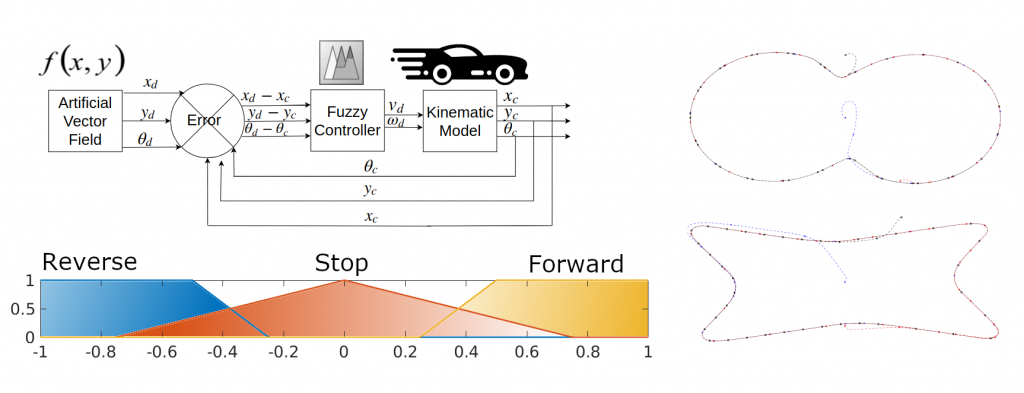
Path planning and trajectory tracking are important topics to be considered when it comes to mobile robotics. In many situations, it is desired that a mobile robot execute a path in order to reach a goal previously determined, or continuously follow a trajectory to patrol a region (usually used in surveillance missions). One can describe both path planning and trajectory tracking as a single problem in two different phases: the first phase involving the path determination and description, and the second phase in which the robot will effectively follow the previously planned path – basically, trajectory tracking – considering its kinematics properties.