Laboratory
Laboratory’s Gallery
Infrastructure
Our Team
About Us
News
Research
Projects
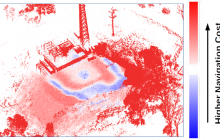
Three-dimensional Mapping with Augmented Navigation Cost
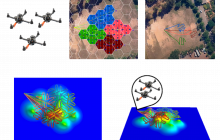
Cooperative Area Coverage Using Hexagonal Segmentation
Fenrir: 3D Printed Robotic Arm
Determining the Association of Individuals and the Collective Social Space
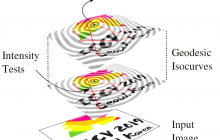
Semantic Description of Objects in Images Based on Prototype Theory
Semantic Mapping for Visual Robot Navigation
Detecting Landmarks On Different Domains Faces
Underwater Imaging
Project system of identification and multiview tracking for equipment and objects in Construction and Manufacturing.
Advanced teleoperation of mining equipment: excavator
Three-Dimensional Reconstruction from Large Image Datasets
Scene Understanding
HeRo: An Open Platform for Robotics Research and Education
Semantic Hyperlapse for First-Person Videos
Publications
Events
Social Media
Linkedin
Instagram
Twitter
YouTube
Contact
Restrict Area
We are a group of experienced designers and developers.
We set new standards in user experience & make future happen.
Here is a place for some photo description.
Learn More
Here is a place for some photo description.
Learn More
Here is a place for some photo description.
Learn More
Here is a place for some photo description.
Learn More
Here is a place for some photo description.
Learn More
Latest projects
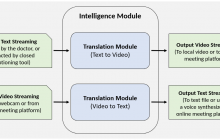
Captar-Libras Project
computer vision
Fenrir: 3D Printed Robotic Arm
robotics
Three-dimensional Mapping with Augmented Navigation Cost
computer vision / robotics
Cooperative Area Coverage Using Hexagonal Segmentation
robotics
Determining the Association of Individuals and the Collective Social Space
robotics
Human Motion Analysis
computer graphics / computer vision
RGB-D Descriptor for non-rigid deformations
computer vision
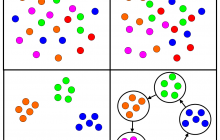
Robotic Swarm Segregation
robotics
Latest stuff from our blog
Accepted papers on WACV 2020
This year, VerLab will contribute with two works accepted in the IEEE Winter Conference on Applications of Computer Vision 2020,…
Permalink
January 5, 2020
PhD Thesis Defense, Michel Silva
We would like to congratulate Michel Melo da Silva for his new achievement, PhD in Computer Science, at the UFMG.…
Permalink
July 12, 2019
Autonomous Robot Competition 2019
Autonomous robot competition at ICEX/UFMG. June 27, 2019 17:00h ICEX-UFMG, Auditorium Number 2.
Permalink
June 5, 2019
Master’s Dissertation Defense, Camila Laranjeira
We would like to congratulate Camila Laranjeira da Silva for her new achievement, Master in Computer Science, at the UFMG.…
Permalink
May 29, 2019
VeRLab and CORO members were qualified for the 2019 AIRR Circuit
Students and professors of the VeRLab and CORO laboratories were classified to compete in the first AIRR (Artificial Intelligence Robotic…
Permalink
May 27, 2019
Master’s Dissertation Defense, Paulo Alfredo Frota Rezeck
We would like to congratulate Paulo Alfredo Frota Rezeck on the defense of his Thesis at UFMG. Title: HERO: AN…
Permalink
February 13, 2019
Master’s Dissertation Defense, Rodrigo Agostinho Chaves
We would like to congratulate Rodrigo Agostinho Chaves on the defense of his Thesis at UFMG. Title: Mapeamento por Grades…
Permalink
February 13, 2019
VeRLab’s members awarded in Robótica 2018
1. The following accepted papers in the 15th IEEE Latin American Robotics Symposium (LARS) and 6th Brazilian Robotics Symposium (SBR)…
Permalink
November 12, 2018