
GEOBIT: A Geodesic-Based Binary Descriptor Invariant to Non-Rigid Deformations for RGB-D Images
2019 International Conference on Computer Vision (ICCV)
Abstract
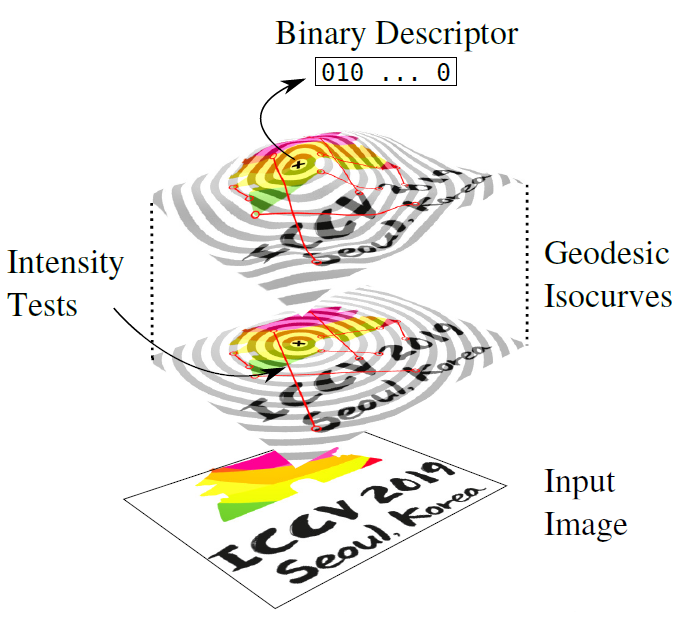
At the core of most three-dimensional alignment and tracking tasks resides the critical problem of point correspondence. In this context, the design of descriptors that efficiently and uniquely identifies keypoints, to be matched, is of central importance. Numerous descriptors have been developed for dealing with affine/perspective warps, but few can also handle non-rigid deformations. In this paper, we introduce a novel binary RGB-D descriptor invariant to isometric deformations. Our method uses geodesic isocurves on smooth textured manifolds. It combines appearance and geometric information from RGB-D images to tackle non-rigid transformations. We used our descriptor to track multiple textured depth maps and demonstrate that it produces reliable feature descriptors even in the presence of strong non-rigid deformations and depth noise. The experiments show that our descriptor outperforms different state-of-the-art descriptors in both precision-recall and recognition rate metrics. We also provide to the community a new dataset composed of annotated RGB-D images of different objects (shirts, cloths, paintings, bags), subjected to strong non-rigid deformations, to evaluate point correspondence algorithms.
Links |
Citation
@INPROCEEDINGS{nascimento2019iccv,
author={E. R. {Nascimento} and G. {Potje} and R. {Martins} and F. {Chamone} and M. {Campos} and R. {Bajcsy}},
booktitle={2019 IEEE/CVF International Conference on Computer Vision (ICCV)},
title={GEOBIT: A Geodesic-Based Binary Descriptor Invariant to Non-Rigid Deformations for RGB-D Images},
year={2019},
volume={},
number={},
pages={10003-10011},
doi={10.1109/ICCV.2019.01010}}
author={E. R. {Nascimento} and G. {Potje} and R. {Martins} and F. {Chamone} and M. {Campos} and R. {Bajcsy}},
booktitle={2019 IEEE/CVF International Conference on Computer Vision (ICCV)},
title={GEOBIT: A Geodesic-Based Binary Descriptor Invariant to Non-Rigid Deformations for RGB-D Images},
year={2019},
volume={},
number={},
pages={10003-10011},
doi={10.1109/ICCV.2019.01010}}
Methodology and Visual Results
Team

Erickson Rangel do Nascimento
Principal Investigator
Guilherme Augusto Potje
PhD Candidate
Renato José Martins
Professor at Université de Bourgogne
Felipe Cadar Chamone
PhD Student
Mario F. M. Campos
Professor