Tabela de conteúdos
Trabalho Prático 2
Robótica móvel (conceitos básicos)
Data de publicação: 08/04/15
Data de apresentação: 29/04/15
Valor: 10 pontos
Objetivos:
- Introdução aos conceitos de controle em malha-aberta.
- Avaliação experimental de erros de locomoção.
- Handyboard
- Familiarização com a execução de tarefas em paralelo
- Utilização das saídas digitais
Material para consulta:
Avaliação:
- O robô deverá ser mostrado em funcionamento no dia da apresentação.
- Deve ser feito um relatório contendo as principais decisões tomadas e desafios encontrados, assim como uma pequena explicação do funcionamento da robô. Adicione fotos e vídeos do desenvolvimento e experimentos realizados.
- O relatório deve estar disponível na página do grupo até a data de entrega.
- Pontuação
- Funcionamento: 4 pontos (Criatividade na resolução do problema, eficácia do mecanismo, software, etc)
- Construção: 4 pontos (Mecânica e Acabamento: estrutura rígida, fios organizados, conectores bem feitos, etc)
- Documentação: 2 pontos
Tarefas:
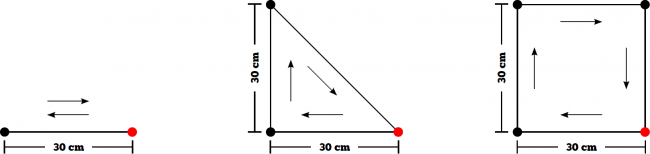
- Locomoção: Desenvolva um robô móvel capaz de realizar um determinado caminho que será selecionado através do menu. A figura abaixo representa os três caminhos que o robô deverá executar. A locomoção deve iniciar e terminar nos pontos demarcados em vermelho.
- OBS: O robô deve deixar demarcado numa cartolina sobre o chão o caminho realizado (cada grupo deve trazer uma cartolina no dia da apresentação).
- OBS 2: Devem ser utilizados no máximo 2 motores.
- Avaliação experimental: Os motores apresentam comportamentos diferentes, dificultando a realização de um controle em malha-aberta (sem realimentação). Para avaliar o impacto desses erros na navegação, realize os seguintes experimentos:
- Erro de translação: Acionar os motores simultaneamento e por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 50% e 100%.
- Dica: Para facilitar, demarque a distância percorrida.
- Erro de rotação: Acionar os motores de forma que o robô gire 90 graus e medir o erro angular obtido para P = 20%, 50% e 100%.
- Dica: Monte uma vareta sobre o robô apontando na direção de movimento.
- Realize pelo menos 5 testes para cada medição e plote um gráfico semelhante a este abaixo informando o máximo, mínimo e a média das medidas.

- Multitarefa: Utilizando a característica multitarefa do IC, o robô deverá realizar três tarefas simultaneamente:
- Movimentar o robô de acordo com um caminho pré-definido.
- Emitir diferentes sons utilizando a função tone(). Se desejar, programe uma música de sua preferência.
- Acionar 3 LEDs de alto brilho das cores Azul, Verde e Vermelho em sequência. Utilize as saídas digitais da Handyboard.
- OBS 1: Utilizar as Digital Outputs (Manual V2 - Seção 12.1.2) - funções poke(), bit_set() e bit_clear()
- OBS 2: Todas as tarefas devem ser interrompidas após 20 segundos.
- OBS 3: O grupo é responsável por adquirir os LEDs. Verifique a maneira correta de fazer a ligação.
- Menu: Todas as tarefas devem ser facilmente acessadas através de um menu. A facilidade de uso desse menu também será avaliado.

