====== Grupo 2 - Marvin ======
 ===== Integrantes =====
===== Integrantes =====
 Luis Guilherme Clementino, Gustavo Cavalieri, Lucas Mattos e Gustavo Teixeira Gomes.
===== Trabalho Prático 1 =====
**Introdução**
Neste primeiro trabalho foi proposto a criação de um manipulador robótico, feito com o kit lego fornecido na disciplina.
**Principais decisões tomadas**
* Construir um manipulador com duas juntas: Revolução (na base) e Prismática (no braço).
* Construir uma caixa de redução da base (aproximadamente 243:1) e um pequeno sistema de redução para o braço.
**Desafios Encontrados**
* Handy board #2 defeituosa -> Não conseguia rodar ambos os motores juntos sem corrente DC proveniente da tomada.
* Trancos e instabilidade na junta de revolução.
* Braço retrátil suficientemente grande e leve para segurar a caneta.
* Instabilidade nos testes.
**Fotos e Videos do experimento e do desenvolvimento**
Video das etapas de desenvolvimento
Galeria de Fotos
===== Trabalho Prático 2 =====
**Introdução**
Neste segundo trabalho foi proposto a criação de um robô móvel capaz de desenhar trajetos predeterminados como uma linha, um quadrado ou um triângulo. O robô também deveria ser capaz de realizar multitarefas como acender leds, tocar musica e se locomover.
**Principais decisões tomadas**
* Construir um robô móvel de três rodas sendo duas delas motorizadas e uma direcional.
* Utilizar rodas menores para proporcionar maior estabilidade e controle.
* Implementar a estrutura da caneta de forma leve e eficiente.
* Não utilzar correias ou eixos de rotação para implementar reduções.
* Proporcionar ao robô uma certa velocidade fazendo pequenas reduções nas rodas motorizadas.
* Determinar experimentalmente a velocidade e a rotação do robô dada uma certa potência dos motores, sendo assim possível determinar o tempo de funcionamento para o desenho das figuras geométricas. (Fator de Rotação e Translação)
**Desafios Encontrados**
* Configurar as ações dos LED's na Handy Board.
* Encontrar a altura ideal da caneta e sua estrutura.
* Comportamento diferente dos motores.
* Encontrar o fator de translação e rotação do robô.
** Análise Experimental **
Visando avaliar o impacto do comportamento diferente dos motores foi proposta uma avaliação experimental para o movimento de translação e rotação.
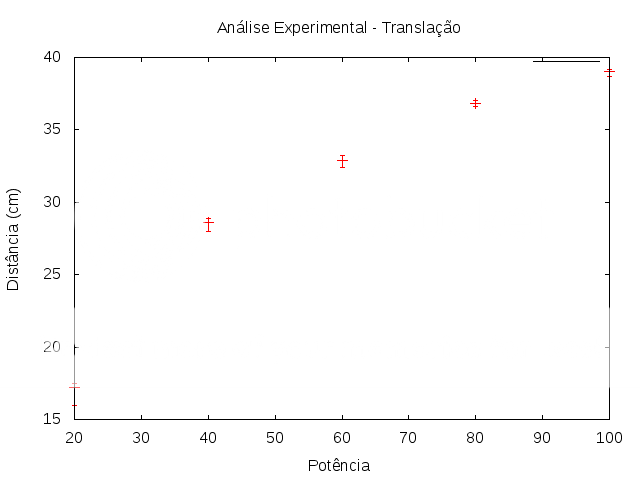
* Erro de translação: Acionar os motores simultaneamente por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
Para cada potência do motor foram executados 5 (cinco) testes. O gráfico abaixo apresenta a média da distância percorrida pelo robô para cada valor de potência. A barra de erro nos mostra os menores e maiores valores respectivamente.
Luis Guilherme Clementino, Gustavo Cavalieri, Lucas Mattos e Gustavo Teixeira Gomes.
===== Trabalho Prático 1 =====
**Introdução**
Neste primeiro trabalho foi proposto a criação de um manipulador robótico, feito com o kit lego fornecido na disciplina.
**Principais decisões tomadas**
* Construir um manipulador com duas juntas: Revolução (na base) e Prismática (no braço).
* Construir uma caixa de redução da base (aproximadamente 243:1) e um pequeno sistema de redução para o braço.
**Desafios Encontrados**
* Handy board #2 defeituosa -> Não conseguia rodar ambos os motores juntos sem corrente DC proveniente da tomada.
* Trancos e instabilidade na junta de revolução.
* Braço retrátil suficientemente grande e leve para segurar a caneta.
* Instabilidade nos testes.
**Fotos e Videos do experimento e do desenvolvimento**
Video das etapas de desenvolvimento
Galeria de Fotos
===== Trabalho Prático 2 =====
**Introdução**
Neste segundo trabalho foi proposto a criação de um robô móvel capaz de desenhar trajetos predeterminados como uma linha, um quadrado ou um triângulo. O robô também deveria ser capaz de realizar multitarefas como acender leds, tocar musica e se locomover.
**Principais decisões tomadas**
* Construir um robô móvel de três rodas sendo duas delas motorizadas e uma direcional.
* Utilizar rodas menores para proporcionar maior estabilidade e controle.
* Implementar a estrutura da caneta de forma leve e eficiente.
* Não utilzar correias ou eixos de rotação para implementar reduções.
* Proporcionar ao robô uma certa velocidade fazendo pequenas reduções nas rodas motorizadas.
* Determinar experimentalmente a velocidade e a rotação do robô dada uma certa potência dos motores, sendo assim possível determinar o tempo de funcionamento para o desenho das figuras geométricas. (Fator de Rotação e Translação)
**Desafios Encontrados**
* Configurar as ações dos LED's na Handy Board.
* Encontrar a altura ideal da caneta e sua estrutura.
* Comportamento diferente dos motores.
* Encontrar o fator de translação e rotação do robô.
** Análise Experimental **
Visando avaliar o impacto do comportamento diferente dos motores foi proposta uma avaliação experimental para o movimento de translação e rotação.
* Erro de translação: Acionar os motores simultaneamente por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
Para cada potência do motor foram executados 5 (cinco) testes. O gráfico abaixo apresenta a média da distância percorrida pelo robô para cada valor de potência. A barra de erro nos mostra os menores e maiores valores respectivamente.
 * Erro de translação: Acionar os motores simultaneamento e por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
**Fotos e Videos do experimento e do desenvolvimento**
Galeria de Fotos
Videos:
Teste de rotação com sobrepeso
* Erro de translação: Acionar os motores simultaneamento e por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
**Fotos e Videos do experimento e do desenvolvimento**
Galeria de Fotos
Videos:
Teste de rotação com sobrepeso

 Luis Guilherme Clementino, Gustavo Cavalieri, Lucas Mattos e Gustavo Teixeira Gomes.
===== Trabalho Prático 1 =====
**Introdução**
Neste primeiro trabalho foi proposto a criação de um manipulador robótico, feito com o kit lego fornecido na disciplina.
**Principais decisões tomadas**
* Construir um manipulador com duas juntas: Revolução (na base) e Prismática (no braço).
* Construir uma caixa de redução da base (aproximadamente 243:1) e um pequeno sistema de redução para o braço.
**Desafios Encontrados**
* Handy board #2 defeituosa -> Não conseguia rodar ambos os motores juntos sem corrente DC proveniente da tomada.
* Trancos e instabilidade na junta de revolução.
* Braço retrátil suficientemente grande e leve para segurar a caneta.
* Instabilidade nos testes.
**Fotos e Videos do experimento e do desenvolvimento**
Video das etapas de desenvolvimento
Galeria de Fotos
===== Trabalho Prático 2 =====
**Introdução**
Neste segundo trabalho foi proposto a criação de um robô móvel capaz de desenhar trajetos predeterminados como uma linha, um quadrado ou um triângulo. O robô também deveria ser capaz de realizar multitarefas como acender leds, tocar musica e se locomover.
**Principais decisões tomadas**
* Construir um robô móvel de três rodas sendo duas delas motorizadas e uma direcional.
* Utilizar rodas menores para proporcionar maior estabilidade e controle.
* Implementar a estrutura da caneta de forma leve e eficiente.
* Não utilzar correias ou eixos de rotação para implementar reduções.
* Proporcionar ao robô uma certa velocidade fazendo pequenas reduções nas rodas motorizadas.
* Determinar experimentalmente a velocidade e a rotação do robô dada uma certa potência dos motores, sendo assim possível determinar o tempo de funcionamento para o desenho das figuras geométricas. (Fator de Rotação e Translação)
**Desafios Encontrados**
* Configurar as ações dos LED's na Handy Board.
* Encontrar a altura ideal da caneta e sua estrutura.
* Comportamento diferente dos motores.
* Encontrar o fator de translação e rotação do robô.
** Análise Experimental **
Visando avaliar o impacto do comportamento diferente dos motores foi proposta uma avaliação experimental para o movimento de translação e rotação.
* Erro de translação: Acionar os motores simultaneamente por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
Para cada potência do motor foram executados 5 (cinco) testes. O gráfico abaixo apresenta a média da distância percorrida pelo robô para cada valor de potência. A barra de erro nos mostra os menores e maiores valores respectivamente.
Luis Guilherme Clementino, Gustavo Cavalieri, Lucas Mattos e Gustavo Teixeira Gomes.
===== Trabalho Prático 1 =====
**Introdução**
Neste primeiro trabalho foi proposto a criação de um manipulador robótico, feito com o kit lego fornecido na disciplina.
**Principais decisões tomadas**
* Construir um manipulador com duas juntas: Revolução (na base) e Prismática (no braço).
* Construir uma caixa de redução da base (aproximadamente 243:1) e um pequeno sistema de redução para o braço.
**Desafios Encontrados**
* Handy board #2 defeituosa -> Não conseguia rodar ambos os motores juntos sem corrente DC proveniente da tomada.
* Trancos e instabilidade na junta de revolução.
* Braço retrátil suficientemente grande e leve para segurar a caneta.
* Instabilidade nos testes.
**Fotos e Videos do experimento e do desenvolvimento**
Video das etapas de desenvolvimento
Galeria de Fotos
===== Trabalho Prático 2 =====
**Introdução**
Neste segundo trabalho foi proposto a criação de um robô móvel capaz de desenhar trajetos predeterminados como uma linha, um quadrado ou um triângulo. O robô também deveria ser capaz de realizar multitarefas como acender leds, tocar musica e se locomover.
**Principais decisões tomadas**
* Construir um robô móvel de três rodas sendo duas delas motorizadas e uma direcional.
* Utilizar rodas menores para proporcionar maior estabilidade e controle.
* Implementar a estrutura da caneta de forma leve e eficiente.
* Não utilzar correias ou eixos de rotação para implementar reduções.
* Proporcionar ao robô uma certa velocidade fazendo pequenas reduções nas rodas motorizadas.
* Determinar experimentalmente a velocidade e a rotação do robô dada uma certa potência dos motores, sendo assim possível determinar o tempo de funcionamento para o desenho das figuras geométricas. (Fator de Rotação e Translação)
**Desafios Encontrados**
* Configurar as ações dos LED's na Handy Board.
* Encontrar a altura ideal da caneta e sua estrutura.
* Comportamento diferente dos motores.
* Encontrar o fator de translação e rotação do robô.
** Análise Experimental **
Visando avaliar o impacto do comportamento diferente dos motores foi proposta uma avaliação experimental para o movimento de translação e rotação.
* Erro de translação: Acionar os motores simultaneamente por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
Para cada potência do motor foram executados 5 (cinco) testes. O gráfico abaixo apresenta a média da distância percorrida pelo robô para cada valor de potência. A barra de erro nos mostra os menores e maiores valores respectivamente.
 * Erro de translação: Acionar os motores simultaneamento e por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
**Fotos e Videos do experimento e do desenvolvimento**
Galeria de Fotos
Videos:
Teste de rotação com sobrepeso
* Erro de translação: Acionar os motores simultaneamento e por um tempo constante, ao final medir a distância percorrida. Devem ser utilizados os seguintes valores de potência: P = 20%, 40%, 60%, 80% e 100%.
**Fotos e Videos do experimento e do desenvolvimento**
Galeria de Fotos
Videos:
Teste de rotação com sobrepeso